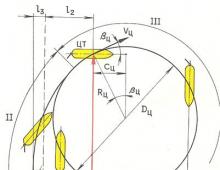
Elements of initial transverse stability. Lateral stability Boat landing straight and on an even keel
By the relative position of the cargo on the ship, the navigator can always find the most favorable value of the metacentric height, at which the ship will be sufficiently stable and less subject to rolling.
The heeling moment is the product of the weight of the cargo moved across the vessel by a shoulder equal to the distance of movement. If a person weighing 75 kg, sitting on the bank will move across the ship by 0.5 m, then the heeling moment will be equal to 75 * 0.5 = 37.5 kg/m.
Figure 91. Static stability diagram
To change the moment that heels the ship by 10 °, it is necessary to load the ship to full displacement, completely symmetrical about the diametrical plane.
The loading of the ship should be checked by drafts measured from both sides. The inclinometer is set strictly perpendicular to the diametral plane so that it shows 0°.
After that, it is necessary to move loads (for example, people) at pre-marked distances until the inclinometer shows 10 °. An experiment for verification should be carried out as follows: heel the ship on one side, and then on the other side.
Knowing the fixing moments of the heeling ship at various (up to the largest possible) angles, it is possible to build a static stability diagram (Fig. 91), which will evaluate the stability of the ship.
Stability can be increased by increasing the width of the vessel, lowering the CG, and installing stern boules.
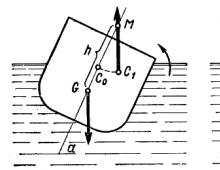
If the center of gravity of the vessel is located below the center of magnitude, then the vessel is considered to be very stable, since the support force during a roll does not change in magnitude and direction, but the point of its application shifts towards the inclination of the vessel (Fig. 92, a).
Therefore, when heeling, a pair of forces is formed with a positive restoring moment, tending to return the ship to a normal vertical position on a straight keel. It is easy to see that h>0, while the metacentric height is 0. This is typical for yachts with a heavy keel and is not typical for larger ships with a conventional hull structure.
If the center of gravity is located above the center of magnitude, then three cases of stability are possible, which the navigator should be well aware of.
The first case of stability.
Metacentric height h>0. If the center of gravity is located above the center of magnitude, then with the inclined position of the vessel, the line of action of the support force crosses the diametrical plane above the center of gravity (Fig. 92, b).

Rice. 92. The Case of a Steady Vessel
In this case, a pair of forces with a positive restoring moment is also formed. This is typical of most conventionally shaped ships. Stability in this case depends on the body and the position of the center of gravity in height.
When heeling, the heeling side enters the water and creates additional buoyancy, tending to level the ship. However, when a vessel rolls with liquid and bulk cargoes capable of moving in the roll direction, the center of gravity will also shift in the roll direction. If the center of gravity during a roll moves beyond the plumb line connecting the center of magnitude with the metacenter, then the ship will capsize.
The second case of unstable sudok with indifferent equilibrium.
Metacentric height h \u003d 0. If the center of gravity lies above the center of magnitude, then with a roll, the line of action of the support force passes through the center of gravity MG \u003d 0 (Fig. 93).
In this case, the center of magnitude is always located on the same vertical with the center of gravity, so there is no restoring pair of forces. Without the influence of external forces, the ship cannot return to a straight position.
In this case, it is especially dangerous and completely unacceptable to transport liquid and bulk cargoes on a ship: with the slightest rocking, the ship will capsize. This is typical for boats with a round frame.
The third case of an unstable ship in unstable equilibrium.
Metacentric height h<0. Центр тяжести расположен выше центра величины, а в наклонном положении судна линия действия силы поддержания пересекает след диаметральной плоскости ниже центра тяжести (рис. 94).
Vessel performance
The most characteristic operational qualities for a small vessel are: passenger capacity,carrying capacity, displacement and speed.
Passenger capacity is an indicator equal to the number of equipped places for accommodating people on a ship. Passenger capacity depends on the carrying capacity:
P = G/100 , people (with luggage), or P =G/75 , people (without luggage)
The result is rounded to the nearest whole number. On a small size vessel, the availability of equipped seats must correspond to the passenger capacity established for this vessel.
Passenger capacity can be approximately calculated by the formula:
N=Lnb Bnb/K, pers.,
Where TO - empirical coefficient taken equal to: for motor and rowing boats - 1.60; for boats - 2.15.
load capacity- the payload of the ship, including the mass of people and luggage according to the passenger capacity. Distinguish between deadweight and net load capacity.
Deadweight - is the difference between the displacements when fully laden and unladen.
Net load capacity - this is the mass of only the payload that the ship can take.
For large vessels, the unit of change in carrying capacity is the ton, for small vessels - kg. The carrying capacity C can be calculated using formulas, or it can also be determined empirically. To do this, on the ship with an empty displacement, but with supplies and a supply of fuel, cargo is sequentially placed until the ship reaches the waterline corresponding to the minimum freeboard. The mass of the placed cargo corresponds to the carrying capacity of the vessel.
Displacement . There are two types of displacement - mass (weight) and volumetric.
Mass (weight) displacement - is the mass of the ship afloat, equal to the mass of water displaced by the ship. The unit of measurement is the ton.
Displacement V - is the volume of the underwater part of the ship in m3. The calculation is made through the main measurements:
V = SL WT,
where S is the coefficient of completeness of displacement, equal to 0.35 - 0.6 for small vessels, and a smaller value of the coefficient is inherent in small vessels with sharp contours. For displacement boats S = 0.4 - 0.55, gliding S = 0.45 - 0.6, motor boats 5 - 0.35 - 0.5, for sailing ships this coefficient ranges from 0.15 to 0.4 .
Speed.
Speed is the distance traveled by a ship per unit of time. On seagoing vessels, speed is measured in knots (miles per hour), and on inland navigation vessels it is measured in kilometers per hour (km/h). The navigator of a small vessel is recommended to know three speeds: the highest (maximum) that the vessel develops at maximum engine power; the smallest (minimum) at which the vessel obeys the helm; medium - the most economical with relatively large transitions. The speed depends on the engine power, the size and shape of the hull, the loading of the vessel and various external factors: waves, wind, current, etc.
Seaworthiness of the vessel
The ability of a vessel to stay afloat, to interact with water, not to capsize or go to the bottom when flooded, is characterized by its seaworthiness. These include: buoyancy, stability and unsinkability.
Buoyancy. Buoyancy is the ability of a ship to stay on the surface of the water, having a given draft. The more weight placed on the ship, the deeper it will sink into the water, but will not lose buoyancy until the water begins to flow into the hull.
In the event of a leak in the hull or a hole, as well as water entering the vessel during stormy weather, its mass increases. Therefore, the ship must have a reserve of buoyancy.
Buoyancy reserve - This is the water-tight volume of the ship's hull, located between the load waterline and the upper edge of the side. In the absence of a reserve of buoyancy, the ship will sink if even a small amount of water gets inside the hull.
The reserve of buoyancy necessary for the safe navigation of the vessel is ensured by giving the vessel a sufficient freeboard, as well as the presence of watertight closures and bulkheads between compartments and buoyancy blocks - structural elements inside the hull of a small vessel in the form of a solid block of material (for example, foam plastic) having a density less than one . In the absence of such bulkheads and buoyancy blocks, any hole in the underwater part of the hull leads to a complete loss of buoyancy and the death of the vessel.
The reserve of buoyancy depends on the height of the freeboard - the higher the freeboard, the greater the margin of buoyancy. This reserve is normalized by the minimum freeboard height, depending on the value of which a safe navigation area and a permissible distance from the coast are established for a particular small size vessel. However, it is impossible to abuse the freeboard height, as this is reflected in another equally important quality - stability
Stability. Stability is the ability of a vessel to resist the forces that cause it to tilt, and after the termination of these forces (wind, wave, passenger movement, etc.) to return to its original equilibrium position. The same vessel may have good stability when the cargo is located close to the bottom in it and may partially or completely lose stability if the cargo or people are placed a little higher.
There are two types of stability: transverse and longitudinal. Lateral stability manifests itself when the vessel rolls, i.e. when tilting it on board. During navigation, two forces act on the ship: gravity and support. The resultant D (Fig. 1, a) of the ship’s gravity, directed downward, will be conditionally applied at point G, called the center of gravity (CG), and the resultant A of the support forces, directed upward, will be conditionally applied at the center of gravity C of the submerged part vessel, called the center of magnitude (CV). When the ship is not trimmed and heeled, the CG and CB will be located in the ship's centreline (DP).
Fig. 1 Location of the resultant forces of gravity and support relative to each other at different positions of the vessel
|
|
|
The ho value characterizes the ship's stability at low inclinations. The position of point M under these conditions is almost independent of the angle of heel φ.
The force D and the equal support force A form a pair of forces with a shoulder /, which creates a restoring moment MB=Dl. This moment tends to return the ship to its original position. Note that the CG is below point M.
Now imagine that an additional load is placed on the deck of the same ship (Fig. 1, c). As a result, the CG will be located much higher, and when heeling, the point M will be lower than it. The resulting pair of forces will no longer create a restoring, but an overturning moment Mopr. Consequently, the ship will be unstable and capsize.
The lateral stability of the vessel is greatly influenced by the width of the hull: the wider the hull, the more stable the vessel, and, conversely, the narrower and higher the hull, the worse the stability will be.
For small-sized high-speed vessels (especially when moving at high speed during waves), the problem of maintaining longitudinal stability is by no means always a solved problem.
For keel small boats, the initial metacentric height is, as a rule, 0.3 - 0.6 m. The stability of the vessel depends on the loading of the vessel, the movement of goods, passengers and other reasons. The greater the metacentric height, the greater the righting moment and the more stable the ship, however, with high stability, the ship has a sharp roll. Stability is improved by the low location of the engine, fuel tank, seats and appropriate placement of goods and people.
With a heavy wind, a strong impact of a wave on the side, and in some other cases, the roll of the vessel increases rapidly and a dynamic heeling moment arises. In this case, the roll of the vessel will increase even after reaching the equality of the heeling and restoring moments. This is due to the action of the force of inertia. Typically, such a roll is twice the roll from the static action of the same heeling moment. Therefore, sailing in stormy weather, especially small boats, is very dangerous.
Longitudinal stability acts when the vessel is tilted towards the bow or stern, i.e. when pitching. This stability should be taken into account by the navigator when moving at high speeds during waves, because. Having “buried” its nose into the water, a boat or motor boat may not restore its original position and sink, and sometimes even capsize.
Factors affecting the stability of the vessel:
a) The stability of the vessel is most significantly affected by its width: the greater it is in relation to its length, depth and draft, the higher the stability.
b) The stability of a small vessel increases if the shape of the submerged part of the hull is changed at large angles of heel. On this statement, for example, the action of side boules and foam fenders is based, which, when immersed in water, create an additional restoring moment.
c) Stability deteriorates when there are fuel tanks on the ship with a mirror surface from side to side, so these tanks must have internal partitions
d) Stability is most strongly affected by the placement of passengers and cargo on the ship, they should be located as low as possible. It is impossible to allow people on board and their arbitrary movement to sit on a small vessel during its movement. Cargoes must be securely fastened to prevent their unexpected displacement from their places of stowage. If this is not possible due to the considerable distance to the shore, then in stormy conditions you should try to keep the ship "bow to the wind", throwing out the floating anchor and running the engine at low speed.
Unsinkability. Unsinkability is the ability of a vessel to remain buoyant after part of the vessel has been flooded.
Unsinkability is ensured structurally - by dividing the hull into watertight compartments, equipping the ship with buoyancy blocks and drainage facilities.
Non-flooded hull volumes are most often foam blocks. Its required quantity and location are calculated to provide an emergency reserve of buoyancy and maintain an emergency ship in the "on an even keel" position.
Of course, in conditions of heavy seas, not every motorboat and boat that has received a hole will ensure the fulfillment of these requirements.
Maneuverability of a small vessel
The main maneuvering qualities of the vessel include: controllability, circulation, propulsion and inertia
Controllability. Controllability is the ability of the vessel to maintain a given direction of movement on the move with a constant rudder position (stability on the course) and change the direction of its movement under the influence of the rudder (agility) on the move.
Stability on course called the property of the vessel to maintain a rectilinear direction of motion. If the ship deviates from the course in the direct position of the rudder, then this phenomenon is usually called the yaw of the ship.
If the ship deviates from the course in the direct position of the rudder, then this phenomenon is usually called the yaw of the ship.
The causes of yaw can be permanent or temporary. Constants include reasons associated with the design features of the vessel: blunt bow hull lines, mismatch between the length of the vessel and its width, insufficient rudder area, the effect of propeller rotation
Temporary yaw can be caused by improper loading of the vessel, wind, shallow water, uneven currents, etc.
The concepts of "stability on the course" and "agility" are contradictory, however, these qualities are inherent in almost all ships and characterize their controllability.
Controllability is influenced by many factors and causes, the main of which are the action of the rudder, the operation of the propeller and their interaction.
Agility- the property of the vessel to change the direction of movement under the influence of the rudder. This quality primarily depends on the correct ratio of the length and width of the hull, the shape of its contours, and also on the area of the rudder blade.
Features of the ship's controllability during the transition from forward to reverse
When carrying out mooring operations or the need to urgently stop the vessel (danger of collision, prevention of grounding, assistance to a person overboard, etc.), it is necessary to switch from forward to reverse. In these cases, the navigator must take into account that in the first seconds, when the right-hand rotation propeller changes from forward to reverse, the stern will rapidly roll to the left, while with the left-hand rotation propeller - to the right.
Reasons affecting controllability
In addition to the rudder and the rotating propeller, other reasons also affect the stability and agility of the vessel, as well as a number of design features of the vessel: the ratio of the main dimensions, the shape of the hull contours, the parameters of the rudder and propeller. Controllability also depends on navigation conditions: the nature of the ship's loading, hydrometeorological factors.
Circulation If, while the ship is moving, the rudder is shifted in any direction, the ship will begin to turn and describe a curved line on the water. This curve, described by the ship's center of gravity during a turn, is called the circulation line (Fig. 2), and the distance between the center line of the ship on a straight course and its center line after turning to the reverse course (180) is called the tactical circulation diameter. The smaller the tactical circulation diameter, the better the ship's agility is considered. This curve is close to a circle, and its diameter serves as a measure of the vessel's agility.
|
|
The circulation diameter is usually measured in meters. For small motorized vessels, the size of the tactical circulation diameter in most cases is 2-3 vessel lengths. Each driver needs to know the diameter of the circulation of the vessel, which he has to manage, since the correct and safe maneuvering largely depends on this. The speed of the vessel on the circulation is reduced to 30%. It should never be forgotten that when moving along a curve, a centrifugal force acts on the ship (Fig. 3), directed from the center of curvature to the outside and applied to the center of gravity of the ship. |
|
Fig 2 Circulation / - circulation line, 2 - tactical diameter of circulation, 3 - diameter of steady circulation |
The drift of the vessel arising from the centrifugal force is hampered by the force of water resistance - lateral resistance, the point of application of which is located below the center of gravity. As a result, a pair of forces arises, creating a roll on the side opposite to the direction of rotation. The list increases with the increase in the center of gravity of the vessel above the center of lateral resistance and with a decrease in the metacentric height. |

Increasing the speed when turning and decreasing the diameter of the circulation will significantly increase the list, which can lead to capsizing of the vessel. Therefore, never make sharp turns when the boat is moving at high speed.
Unlike conventional displacement vessels, vessels with planing contours on circulation receive a list to the inside (Fig. 4). This comes from the additional lifting force that occurs on the hull during lateral displacement due to the gliding contours. At the same time, sliding under the action of centrifugal force to the outside occurs, which is why the circulation of gliding vessels is somewhat greater than that of displacement vessels.
In addition to the circulation diameter, one should also know its time, i.e. the time it takes the ship to make a 360° turn.
These circulation elements depend on the displacement of the vessel and the nature of the placement of cargo along its length, as well as on the speed. At low speed, the circulation diameter is smaller.
Walkability. Propulsion is the ability of a ship to move at a certain speed for a given engine power, while overcoming the forces of resistance to movement.
The movement of the vessel is possible only if there is a certain force that is able to overcome the resistance of the water - an emphasis. At a constant speed, the value of the stop is equal to the value of the water resistance. The speed of the vessel and the emphasis are related by the following relationship:
R. V=ho-N.Where: V - vessel speed; K - water resistance; N - engine power; ho - efficiency = 0.5.
This equation shows that as the speed increases, so does the resistance of the water. However, this dependence has a different physical meaning and character for displacement and planing vessels.
For example, at a speed of a displacement vessel up to a value equal to V = 2 ÖL, km/h (L is the length of the vessel, m), the water resistance K is the sum of the water friction resistance against the hull skin and the shape resistance, which is created by water turbulence. When the speed of this vessel exceeds the specified value, waves begin to form and a third is added to the two resistances - wave resistance. Wave resistance increases sharply with increasing speed.
For gliding ships, the nature of the water resistance is the same as for displacement ships and the speed is V = 8 ÖL km/h. However, with a further increase in speed, the vessel receives a significant trim to the stern and its bow rises. This mode of motion is called transitional (from displacement to planing). A characteristic sign of the beginning of gliding is a spontaneous increase in the speed of the vessel. This phenomenon is caused by the fact that after lifting the bow, the overall water resistance of the vessel decreases, it seems to “float up” and increase speed at a constant power.
When gliding, another type of water resistance arises - spray, and wave resistance and form resistance are sharply reduced and their values are practically reduced to zero.
Thus, four types of resistance affect the ship's propulsion:
friction resistance- depends on the area of the wetted surface of the ship, on the quality of its treatment and the degree of fouling (algae, molluscs, etc.);
shape resistance- depends on the streamlining of the hull, which, in turn, is the better, the sharper the aft end and the greater the length of the vessel compared to the width;
wave resistance- depends on the shape of the bow and the length of the vessel, the longer the vessel, the less wave formation;
splash resistance- depends on the ratio of the body width to its length.
Conclusion: 1. Displacement vessels with a narrow hull, round-billed contours and pointed fore and aft ends experience the least water resistance.
2. For planing vessels, in the absence of waves, a wide flat-bottomed hull with a transom stern provides the least water resistance with the greatest hydrodynamic lifting force.
More seaworthy planing vessels with a keeled or semi-keeled hull. The increase in the speed of these vessels is achieved by longitudinal steps and bilge splash guards.
Inertia. A very important maneuvering quality of a vessel is its inertia. It is usually customary to evaluate it by the lengths of the braking distance, run-out and acceleration path, as well as their duration. The distance that the vessel travels during the period of time from the moment the engine is switched from full forward to reverse until the final stop of the vessel is called the stopping distance. This distance is usually expressed in meters, less often - in the length of the vessel. The distance traveled by the vessel during the period of time from the moment the engine is stopped, working in forward gear, to the complete stop of the vessel under the action of the force of water resistance, is called the run-out. The distance that the ship travels from the moment the engine is turned on to forward until the moment it acquires full speed at a given engine operating mode is called the acceleration path. Accurate knowledge by the driver of the above qualities of his ship to a large extent ensures the safety of maneuvering in narrow spaces and in roads with cramped navigation conditions. Remember! Motorized boats do not have brakes, so they often require significantly more distance and time to absorb inertia than, say, a car.
Stability called the ability of a vessel tilted by the action of external forces from a position of equilibrium, to return to a state of equilibrium after the termination of these forces.
The inclination of the vessel can occur under the influence of such external forces as the movement, acceptance or expenditure of cargo, wind pressure, the action of waves, the tension of the towline, etc.
The stability that a ship has with longitudinal inclinations, measured by trim angles, is called longitudinal. It is usually quite large, so the danger of capsizing the vessel through the bow or stern never arises. But studying it is necessary to determine the trim of the vessel under the influence of external forces. The stability that the ship has with transverse inclinations, measured by roll angles 6, is called transverse.
Lateral stability is the most important characteristic of a vessel, which determines its seaworthiness and the degree of navigation safety. When studying transverse stability, a distinction is made between initial stability (at small inclinations of the vessel) and stability at large angles of heel. initial stability. When the ship rolls at a small angle, under the action of any of the named external forces, the CV moves due to the movement of the underwater volume (Fig. 149). The value of the restoring moment formed in this case depends on the value of the shoulder l= GK between forces
weight and support of the tilted vessel. As can be seen from the figure, the restoring moment MV= Dl = Dh sinθ, where h- point elevation M above the ship's CG G called ship's transverse metacentric height. Dot M is called the transverse metacenter of the vessel.
Rice. 149. The action of forces when the ship rolls
Metacentric height is the most important characteristic of stability. It is defined by the expression
h = z c + r - z g,
Where z c- elevation of the CV over the OL; r- transverse metacentric radius, i.e., the elevation of the metacenter above the CV; zg- elevation of the ship's CG above the OL.
Meaning zg determined when calculating the load mass. Approximately possible
accept (for a ship with a full load) zg = (0,654-0,68) H, Where H- height amidships.
Meaning z c And r determined according to a theoretical drawing or (for estimated calculations) according to approximate formulas, for example:
![]()
![]()
Where IN- width of the vessel, m; T- draft, m; α is the coefficient of completeness of the waterline; δ - coefficient of overall completeness; TO- coefficient depending on the shape of the waterline and its completeness and varying within 0.086 - 0.089.
From the above formulas it can be seen that the transverse stability of the vessel increases with an increase in B and α; with decreasing T and δ; with CV elevation z c; With
decrease in CG zg. Thus, wide vessels are more stable, as well as vessels with a low central heating position. When lowering the central heating, i.e., when placing heavier loads - mechanisms and equipment - as low as possible and with
facilitation of high-lying structures (superstructures, masts, pipes, which are sometimes made of light alloys for this purpose), the metacentric height increases. And vice versa, when receiving heavy loads on the deck, icing over the surface of the hull, superstructures, masts, etc., while the vessel is navigating in winter conditions, the stability of the vessel decreases.
Inclining experience. On the built vessel, the initial metacentric height is determined (using the metacentric stability formula) empirically - by inclining the vessel, which is carried out at an angle of 1.5-2 by transferring a pre-weighed load from side to side. The scheme of the inclining experiment is shown in fig. 150.

Rice. 150. Scheme of inclining experience.
1 - rail with divisions; 2 - weight and lionfish; 3 - bath with water or oil; 4 - weight thread; 5 - portable securing weight
heeling moment M cr caused by the transfer of cargo R at a distance at: M cr = Ru. According to the metacentric stability formula h = M KP /Dθ (sin θ is replaced by θ due to the smallness of the bank angle θ). But θ = d/l, That's why h = Pyl/Dd.
The values of all quantities included in this formula are determined during the inclining test. The displacement is found by calculation from the drafts measured by the marks of the deepening.
On small ships, the transfer of cargo (cast iron ingots, sandbags, etc.) is sometimes replaced by rushes of people with a total mass of about 0.2-0.5% of the empty ship's displacement. The roll angle θ is measured with weights dipped in oil baths. Recently, weights have been replaced with special instruments that allow you to accurately measure the angle of heel during the heeling test (taking into account the rocking of the vessel during the transfer of cargo), the so-called inclinographs.
Based on the initial metacentric height found using the inclining experience, the position of the CG of the constructed vessel is calculated using the above formulas.
The following are approximate transverse metacentric heights for different types of fully loaded ships:
Large passenger ships …………………………… 0.3-1.5
Medium and small passenger ships. . . ……………… 0.6-0.8
Large dry cargo ships …………………………….. 0.7-1.0
Medium ………………………………………………….. 0.5-0.8
Large tankers ………………………………… 2.0-4.0
Medium …………………………………………………... 0.7-1.6
River passenger ships …………………………….... 3.0-5.0
Barges ……………………………………………………… 2.0-10.0
Icebreakers ……… ………………………………………… 1.5-4.0
Tugs …………………………………………………… 0.5-0.8
Fishing vessels …………………………………. 0.7-1.0
Stability at high angles of heel. As the ship's roll angle increases, the restoring moment first increases (Fig. 151, a-c), then decreases, becomes equal to zero and no longer prevents, but, on the contrary, contributes to the further inclination of the vessel (Fig. 151, d).

Rice. 151. The action of forces when the vessel rolls at large angles
Since the displacement D for a given load state remains constant, then the restoring moment M in changes in proportion to the change in the shoulder l transverse stability. This change in the shoulder of stability depending on the angle of heel 8 can be calculated and displayed graphically, in the form static stability diagrams(Fig. 152), which is built for the most typical and dangerous cases of ship loading in relation to stability.
The static stability chart is an important document characterizing the ship's stability. With its help, it is possible, knowing the value of the heeling moment acting on the ship, for example, from wind pressure, determined on the Beaufort scale (Table 8), or from the transfer of cargo on board, from ballast water or fuel reserves received asymmetrically by the DP, etc. , - find the value of the resulting roll angle in the event that this angle is large (more than 10 °). The small bank angle is calculated without plotting the chart using the above metacentric formula.

Rice. 152. Diagram of static stability
From the static stability diagram, it is possible to determine the initial metacentric height of the ship, which is equal to the segment between the horizontal axis and the point of intersection of the tangent to the curve of the stability arms at the origin of coordinates with the vertical, drawn at a heel angle equal to one radian (57.3 °). Naturally, the steeper the curve at the origin, the greater the initial metacentric height.
The static stability diagram is especially useful when it is necessary to know the angle of the ship's heel from the action of a suddenly applied force - with the so-called dynamic action of the force.
If any statically, i.e. smoothly, without jerks, applied force acts on the ship, then the heeling moment formed by it creates a heel angle, which is determined from the static stability diagram (built in the form of a curve for changing restoring moments D(from the roll angle) at the point of intersection with the curve of a horizontal straight line drawn parallel to the horizontal axis at a distance equal to the value of the heeling moment (Fig. 153, a). At this point (point A) heeling moment from the action of static
Characteristics of wind and sea waves
force is equal to the restoring moment that occurs when the ship rolls and tends to return the rolled ship to its original, straight position. The angle of roll at which the heeling and restoring moments are equal is the desired angle of roll from a statically applied force.
If the heeling force acts on the ship dynamically, i.e. suddenly (a gust of wind, a jerk of a towing cable, etc.), then the angle of heel caused by it is determined from the static stability diagram in a different way.


Rice. 153. Determination of the angle of roll from the action of static ( A) and dynamically ( b) applied force
The horizontal line of the heeling moment, for example, from the action of wind during a squall, is continued to the right of point A (Fig. 153, b) until the area ABC cut off by it inside the diagram becomes equal to the area AOD outside of it; while the angle of roll (point E) corresponding to the position of the straight line Sun, is the desired roll angle from the action of a dynamically applied force. Physically, this corresponds to the angle of heel at which the work of the heeling moment (graphically represented by the area of the rectangle ODCE) turns out to be equal to the work of the restoring moment (the area of the figure BOTH).
If the area bounded by the restoring moment curve is insufficient to equal the area of the figure bounded by the heeling moment outside it, then the ship will capsize. Therefore, one of the main characteristics of the diagram, indicating the stability of the vessel, is its area, limited by the curve and the horizontal axis. On fig. 154 shows the curves of the shoulders of static stability of two vessels: with a large initial stability, but with a small diagram area ( 1 ) and with a smaller initial metacentric height, but with a larger diagram area (2). The last ship is able to withstand a stronger wind, it is more stable. Typically, the chart area is larger for a vessel with a high freeboard and less for a vessel with a low freeboard.

Rice. 154. Static stability curves of a vessel with high (1) and low (2) freeboard
The stability of sea-going vessels must comply with the Stability Standards of the Register of the USSR, which provide for the following condition as the main criterion (called the “weather criterion”): capsizing moment M def, i.e. the minimum dynamically applied moment, which, with the simultaneous action of rolling and the worst load, causes the ship to capsize, should not be less than the heeling moment dynamically applied to the ship M cr on wind pressure, i.e. K = M def/M cr≥ l.00.
In this case, the value of the overturning moment is found from the static stability diagram according to a special scheme, and the value (in kN∙m) of the heeling moment (Fig. 155) compared with it is found using the formula M cr = 0.001P in S p z n, Where R in- wind pressure, MPa or kgf / m 2 (determined according to the Beaufort scale in the column "during a squall" or according to the table of the Register of the USSR); S n- sail area (area of the lateral projection of the surface part of the vessel), m 2; z n- elevation of the center of sail above the waterline, m
When studying the static stability diagram, the angle at which the curve intersects the horizontal axis is of interest - the so-called sunset angle. According to the Register Rules, for marine vessels this angle should not be less than 60°. The same Rules require that the maximum values of the restoring moments on the chart be achieved at a heel angle of at least 30°, and the maximum stability arm should be at least 0.25 m for ships up to 80 m in length and not less than 0.20 m for ships with a length of over 105 m.

Rice. 155. To the determination of the heeling moment from the action of wind force
in a squall (sail area is shaded)
Influence of liquid cargoes on stability. The liquid cargoes in the tanks, when the tanks are not completely filled, move in the direction of inclination in case of inclination of the vessel. Because of this, the ship's CG moves in the same direction (from the point G0 exactly g), which leads to a decrease in the lever of the restoring moment. On fig. 156 shows how the shoulder of stability l 0 when taking into account the displacement of the liquid cargo, it decreases to l. At the same time, the wider the tank or compartment having a free liquid surface, the greater the displacement of the CG and, consequently, the greater the decrease in lateral stability. Therefore, in order to reduce the effect of liquid cargo, they seek to reduce the width of the tank, and during operation - to limit the number of tanks in which free levels are formed, i.e., not to spend stocks from several tanks at once, but alternately.
Influence of bulk cargoes on stability. Bulk cargo includes grain of all kinds, coal, cement, ore, ore concentrates, etc.
The free surface of liquid cargoes always remains horizontal.
In contrast, bulk cargoes are characterized by the angle of repose, i.e., the largest angle between the surface of the cargo and the horizontal plane, at which the cargo is still at rest and above which spillage begins. For most bulk cargoes, this angle is in the range of 25-35°.
Bulk cargo loaded onto a ship is also characterized by porosity, or porosity, that is, the ratio of the volumes directly occupied by the cargo particles and the voids between them. This characteristic, which depends both on the properties of the cargo itself and on the method of its loading into the hold, determines the degree of its shrinkage (compaction) during transportation.

Rice. 156. To determine the influence of the free surface of a liquid cargo
for stability
When transporting bulk cargo (especially grain), as a result of the formation of voids as they shrink from shaking and vibration of the hull during the voyage, with sharp or large inclinations of the vessel under the action of a squall (exceeding the angle of repose), they are poured onto one side and no longer return completely to the original position after the vessel is straightened.
The amount of cargo (grain) poured in this way gradually increases and causes a roll, which can lead to the capsizing of the vessel. To avoid this, special measures are taken - they place bags of grain on top of the grain poured into the hold (bagging of cargo) or install additional temporary longitudinal bulkheads in the holds - shifting boards (see Fig. 154). If these measures are not taken, serious accidents and even the death of ships occur. Statistics show that more than half of the ships lost due to capsizing were carrying bulk cargo.
A particular danger arises during the transportation of ore concentrates, which, when their humidity changes during the voyage, for example, when thawing or sweating, acquire high mobility and easily shift to the side. This still little-studied property of ore concentrates has caused a number of severe ship accidents.
Stability is the ability of a vessel deviated from the equilibrium position to return to it after the cessation of the forces that caused the deviation.
Vessel inclinations can occur from the action of oncoming waves, due to asymmetric flooding of compartments during a hole, from the movement of goods, wind pressure, due to the acceptance or expenditure of goods.
The inclination of the ship in the transverse plane is called roll, and in the longitudinal trim. The angles formed in this case are denoted respectively by θ and ψ
The stability that a ship has in longitudinal inclinations is called longitudinal. It is, as a rule, quite large, and the danger of capsizing the vessel through the bow or stern never arises.
The stability of the vessel with transverse inclinations is called transverse. It is the most important characteristic of the ship, which determines its seaworthiness.
There are initial transverse stability at small angles of heel (up to 10 - 15 °) and stability at large inclinations, since the restoring moment at small and large angles of heel is determined in various ways.
initial stability. If the vessel is under the influence of an external heeling moment M KR(for example, wind pressure) will roll by an angle θ (the angle between the original WL 0 and current WL 1 waterlines), then, due to a change in the shape of the underwater part of the vessel, the center of magnitude WITH move to a point From 1(Fig. 5). Sustaining power yV will be applied at the point C1 and directed perpendicular to the current waterline WL 1 . Dot M located at the intersection of the diametrical plane with the line of action of the supporting forces and is called transverse metacenter. Vessel weight force R stays in the center of gravity G. Together with strength yV it forms a pair of forces that prevents the vessel from tilting by the heeling moment M KR. The moment of this pair of forces is called restoring moment M V. Its value depends on the shoulder l=GK between the forces of weight and support of an inclined vessel: M B \u003d Pl \u003d Ph sin θ, Where h- point elevation M above the ship's CG g, called transverse metacentric height vessel.
Rice. 5. The action of forces during the roll of the vessel.
It can be seen from the formula that the value of the restoring moment is the greater, the greater h. Therefore, the metacentric height can serve as a measure of stability for a given vessel.
Value h of a given ship at a certain draft depends on the position of the center of gravity of the ship. If the loads are placed so that the ship's center of gravity takes a higher position, then the metacentric height will decrease, and with it the static stability arm and the restoring moment, i.e., the ship's stability will decrease. With a decrease in the position of the center of gravity, the metacentric height will increase, the stability of the vessel will increase.
Since for small angles their sines are approximately equal to the angles measured in radians, we can write M B = Phθ.
The metacentric height can be determined from the expression h = r + z c - z g , Where z c- elevation of the CV over the OL; r- transverse metacentric radius, i.e., the elevation of the metacenter above the CV; z g- elevation of the ship's CG above the main one.
On a built ship, the initial metacentric height is determined empirically - inclining, i.e., the transverse inclination of the vessel by moving a load of a certain weight, called roll-ballast.
Stability at high angles of heel. As the ship's roll increases, the restoring moment first increases, then decreases, becomes equal to zero, and then not only does not prevent the inclination, but, on the contrary, contributes to it (Fig. 6).

Rice. 6. Diagram of static stability.
Since the displacement for a given load state is constant, the restoring moment changes only due to a change in the lateral stability arm l st. According to the calculations of transverse stability at large angles of heel, static stability diagram, which is a graph expressing the dependence l st from the roll angle. The static stability diagram is built for the most typical and dangerous cases of ship loading.
Using the diagram, it is possible to determine the heeling angle from a known heeling moment or, conversely, to find the heeling moment from a known heeling angle. The initial metacentric height can be determined from the static stability diagram. To do this, a radian equal to 57.3 ° is laid off from the origin of coordinates, and the perpendicular is restored to the intersection with the tangent to the curve of the stability shoulders at the origin. The segment between the horizontal axis and the intersection point on the scale of the diagram will be equal to the initial metacentric height.
With a slow (static) action of the heeling moment, the state of equilibrium during a roll occurs if the condition of equality of the moments is observed, i.e. M KR \u003d M B(Fig. 7).

Rice. 7. Determination of the roll angle from the action of statically (a) and dynamically (b) applied force.
With the dynamic action of the heeling moment (a gust of wind, a jerk of the towing cable on board), the vessel, tilting, acquires an angular velocity. By inertia, it will pass the position of static equilibrium and will continue to heel until the work of the heeling moment becomes equal to the work of the restoring moment.
The value of the angle of heel under the dynamic action of the heeling moment can be determined from the static stability diagram. The horizontal line of the heeling moment is continued to the right until the area ODSE(work of the heeling moment) will not become equal to the area of the figure BOTH(restoring moment work). At the same time, the area OASE is common, so we can restrict ourselves to comparing areas OH YEAH And ABC.
If the area bounded by the restoring moment curve is insufficient, the ship will capsize.
The stability of seagoing vessels must meet the Register requirements, according to which it is necessary to fulfill the condition (the so-called weather criterion): K \u003d M def min / M d max ≥ 1" where M def min- minimum overturning moment (minimum dynamically applied heeling moment, taking into account pitching), under the influence of which the vessel will not lose stability yet; M d max- dynamically applied heeling moment from wind pressure at the worst loading option in terms of stability.
In accordance with the requirements of the Register, the maximum arm of the static stability diagram lmax shall be not less than 0.25 m for vessels of 85 m in length and not less than 0.20 m for vessels over 105 m at an angle of heel θ of more than 30°. The slope angle of the diagram (the angle at which the curve of the stability arms intersects the horizontal axis) for all vessels must be at least 60°.
Influence of liquid cargoes on stability. If the tank is not filled to the top, that is, it has a free liquid surface, then when tilted, the liquid will overflow in the direction of the roll and the center of gravity of the vessel will shift to the same side. This will lead to a decrease in the stability arm and, consequently, to a decrease in the restoring moment. At the same time, the wider the tank, in which there is a free surface of the liquid, the more significant will be the decrease in lateral stability. To reduce the influence of the free surface, it is advisable to reduce the width of the tanks and strive to ensure that during operation there is a minimum number of tanks with a free surface of the liquid.
Influence of bulk cargoes on stability. When transporting bulk cargo (grain), a slightly different picture is observed. At the beginning of the inclination, the load does not move. Only when the angle of heel exceeds the angle of repose does the cargo begin to spill. In this case, the spilled cargo will not return to its previous position, but, remaining at the side, will create a residual roll, which, with repeated heeling moments (for example, squalls), can lead to loss of stability and capsizing of the vessel.
To prevent spillage of grain in the holds, suspended longitudinal semi-bulkheads are installed - shifting boards or stack sacks of grain on top of the grain poured in the hold (cargo bagging).
Effect of a suspended load on stability. If the cargo is in the hold, then when it is lifted, for example, by a crane, there is, as it were, an instantaneous transfer of the cargo to the suspension point. As a result, the ship's CG will shift vertically upward, which will lead to a decrease in the righting moment arm when the ship receives a roll, i.e., to a decrease in stability. In this case, the decrease in stability will be the greater, the greater the mass of the load and the height of its suspension.
Stability called the ability of the ship to resist the forces that deviate it from the equilibrium position, and return to its original equilibrium position after the termination of these forces.
The equilibrium conditions of the vessel obtained in Chapter 4 "Buoyancy" are not sufficient for it to constantly float in a given position relative to the water surface. It is also necessary that the balance of the vessel is stable. The property, which in mechanics is called the stability of equilibrium, in the theory of the ship is usually called stability. Thus, buoyancy provides the conditions for the equilibrium position of the vessel with a given landing, and stability ensures the preservation of this position.
The stability of the vessel changes with an increase in the angle of inclination and at a certain value it is completely lost. Therefore, it seems appropriate to study the stability of the vessel at small (theoretically infinitesimal) deviations from the equilibrium position with Θ = 0, Ψ = 0, and then determine the characteristics of its stability, their permissible limits at large inclinations.
It is customary to distinguish vessel stability at low inclination angles (initial stability) and stability at high inclination angles.
When considering small inclinations, it is possible to make a number of assumptions that make it possible to study the initial stability of the vessel within the framework of the linear theory and obtain simple mathematical dependences of its characteristics. Vessel stability at large angles of inclination is studied using a refined non-linear theory. Naturally, the stability property of the ship is unified and the accepted division is purely methodological.
When studying the stability of a vessel, its inclinations are considered in two mutually perpendicular planes - transverse and longitudinal. When the vessel is tilted in the transverse plane, determined by the angles of heel, it is studied lateral stability; with inclinations in the longitudinal plane, determined by the trim angles, study it longitudinal stability.
If the inclination of the ship occurs without significant angular accelerations (pumping liquid cargo, slow water flow into the compartment), then stability is called static.
In some cases, the forces tilting the vessel act suddenly, causing significant angular accelerations (wind squall, wave surge, etc.). In such cases, consider dynamic stability.
Stability is a very important nautical property of a vessel; together with buoyancy, it ensures the navigation of the vessel in a given position relative to the surface of the water, which is necessary to ensure propulsion and maneuver. A decrease in the ship's stability can cause an emergency roll and trim, and a complete loss of stability can cause it to capsize.
In order to prevent a dangerous decrease in the ship's stability, all crew members must:
always have a clear idea of the ship's stability;
know the reasons that reduce stability;
know and be able to apply all means and measures to maintain and restore stability.